
Request a Quote
Request a Quote
En los últimos años, los casos de aplicación de robots industriales en China han aumentado rápidamente, principalmente en soldadura, pulverización, manipulación y otros campos, y no hay muchas aplicaciones en doblado. El doblado de piezas de trabajo es un tipo de trabajo que se usa ampliamente y tiene cierto peligro, por lo que las perspectivas de mercado del doblado por robots son muy optimistas y hay muchas experiencias exitosas en el extranjero. En la actualidad, entre el 40% y el 50% de las máquinas dobladoras en los talleres de procesamiento de chapa en Europa y América están equipadas con un sistema de doblado automático por robot, mientras que la automatización del doblado en China está apenas en su infancia. En los próximos 10 años, la demanda interna de robots dobladores aumentará en línea recta.

La unidad de mecanizado flexible de doblado de placas CNC con robot como parte ejecutiva central es un conjunto de combinación de equipos altamente automáticos, que tiene las ventajas de alta eficiencia, alta calidad y alta flexibilidad. En la unidad de mecanizado flexible de flexión, elegir la combinación de componentes adecuada puede proporcionar un mejor soporte para mejorar la eficiencia y flexibilidad del mecanizado. La precisión del doblado depende de la precisión de la propia máquina dobladora, la precisión de posicionamiento del robot y el control cooperativo entre el robot y la máquina dobladora. La dificultad del control cooperativo radica en la adaptación de la velocidad entre el robot y la máquina dobladora, así como en la trayectoria del robot que soporta la pieza de trabajo. El efecto de seguimiento deficiente afectará seriamente el efecto de formación del ángulo de flexión y la placa.
La unidad de procesamiento de cuasi doblado (Figura 1) toma el robot y la máquina dobladora como núcleo, y la pinza, la plataforma de carga, la plataforma de corte, el banco de trabajo de posicionamiento, el marco giratorio, el dispositivo de cambio de mano y varios sensores de detección como componentes auxiliares.
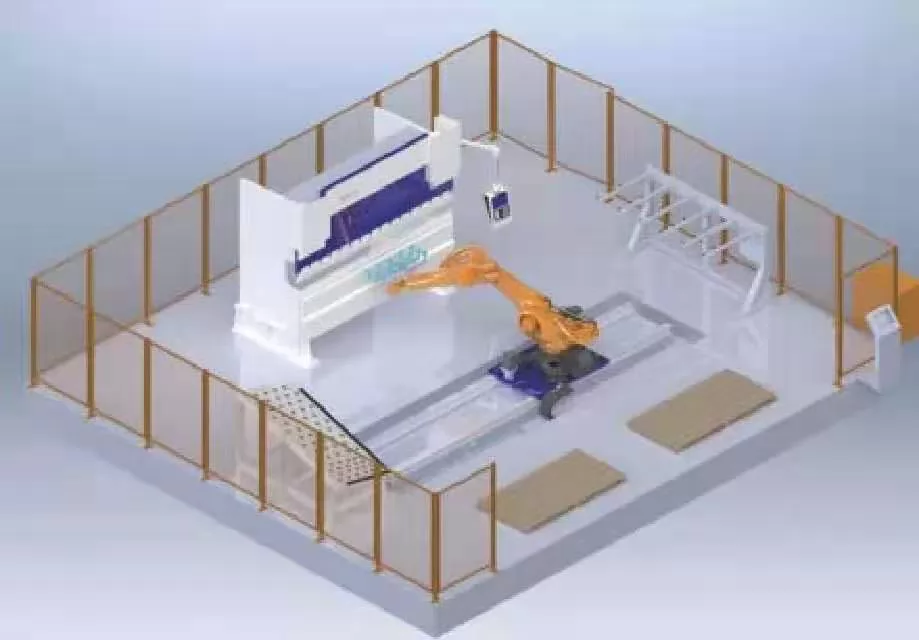
El agarre es la "mano" de un robot en lugar de un trabajo manual. La pinza del robot doblador generalmente se compone de varias ventosas instaladas en una estructura de metal. Las plataformas de carga y descarga generalmente adoptan paletas paletizadas, y también se utilizan cintas transportadoras o mesas de rodillos para transportar materias primas y productos terminados. Las placas aceitosas se adhieren fácilmente, lo que lleva a que se recojan varias placas a la vez. Se puede instalar un dispositivo de separación (como un separador magnético) y un sensor de detección al lado de la mesa de alimentación para garantizar que las placas a agarrar sean hojas individuales. La mesa de posicionamiento es una plataforma inclinada con un deflector, sobre la cual se encuentran microbolas elevadas. El robot transfiere la placa de acero a la plataforma de posicionamiento y la placa se desliza libremente hasta el borde de retención bajo la gravedad. Debido a que la posición y el borde de la mesa de posicionamiento son fijos, cuando el robot vuelve a agarrar la placa, la posición de la placa y el agarre es relativamente precisa y fija, lo que proporciona una referencia para el siguiente doblado. El trípode es un marco fijo del dispositivo de agarre. Cuando el robot necesita tomar la pieza de trabajo en una posición diferente, puede colocar la pieza de trabajo en el marco de rotación para fijarla y luego el robot puede tomar la pieza de trabajo en una nueva posición nuevamente. En algunas ocasiones especiales, también es posible utilizar el molde de la máquina dobladora para sujetar la pieza de trabajo y cambiar la posición de agarre.
El trabajo de la unidad de procesamiento de doblado se divide principalmente en seis procesos: alimentación, recuperación, centrado, torneado, doblado y apilado, como se muestra en la Figura 2.
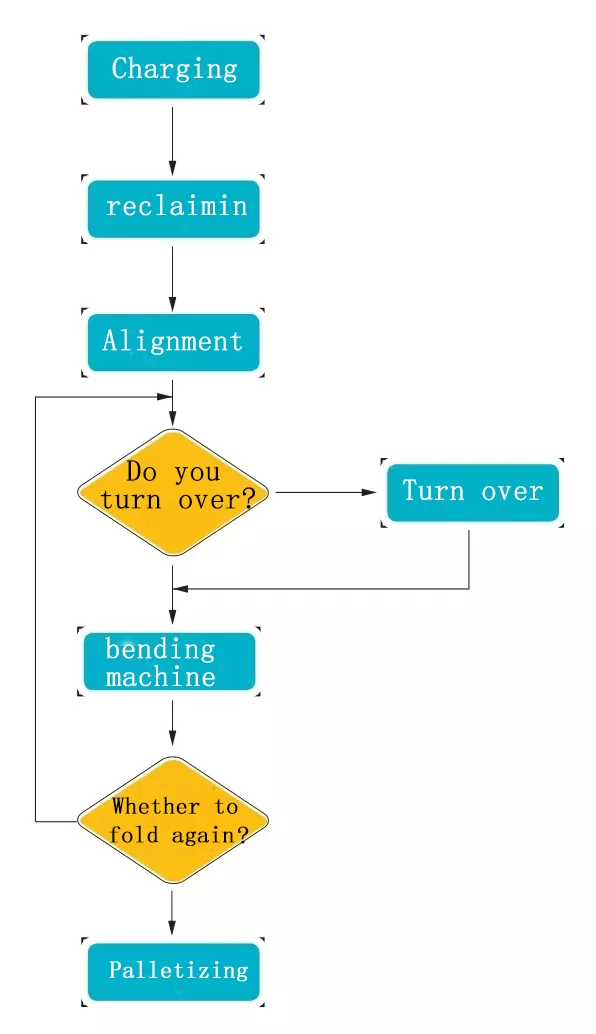
1. Cargando.Coloque manualmente toda la pila de placas a procesar en la plataforma de carga e instale el interruptor de detección de placas en la plataforma de carga para evitar que el robot agarre la bandeja después de procesar todas las placas.
2. Saque los materiales.El robot corre hasta la posición de la plataforma de carga y detecta la altura de la placa a través del sensor ultrasónico instalado en la cuchara. Según los datos de detección, corre automáticamente a la posición adecuada para agarrar la placa. Después de agarrar la placa, mide el espesor de la misma a través del dispositivo de medición de espesor, para evitar agarrar varias placas a la vez, lo que resulta en fallas en el procesamiento. Después de pasar la medición de espesor, está listo para centrar.





.png)




.png)
.png)